{kind=link}
Description: JPEG image
|
| From: | Peter Crosthwaite |
| Subject: | [Qemu-devel] [RFC] SSI QOMification |
| Date: | Mon, 18 Jun 2012 15:13:42 +1000 |
HI All,
Have another one of these long RFCs for you all RE some QOM
refactoring. This time around SSI/SPI and supporting multiple devices
connected to one chip select.
I have a pending series that is in Limbo, mainly this patch is problematic:
http://lists.gnu.org/archive/html/qemu-devel/2012-06/msg00227.html
Im trying to get some nice clean multi-device SPI device support going
to match the Xilinx XPI controller, but other machine models (mainly
stellaris) have a more ah-hoc approach to SSI around point-to-point
links.
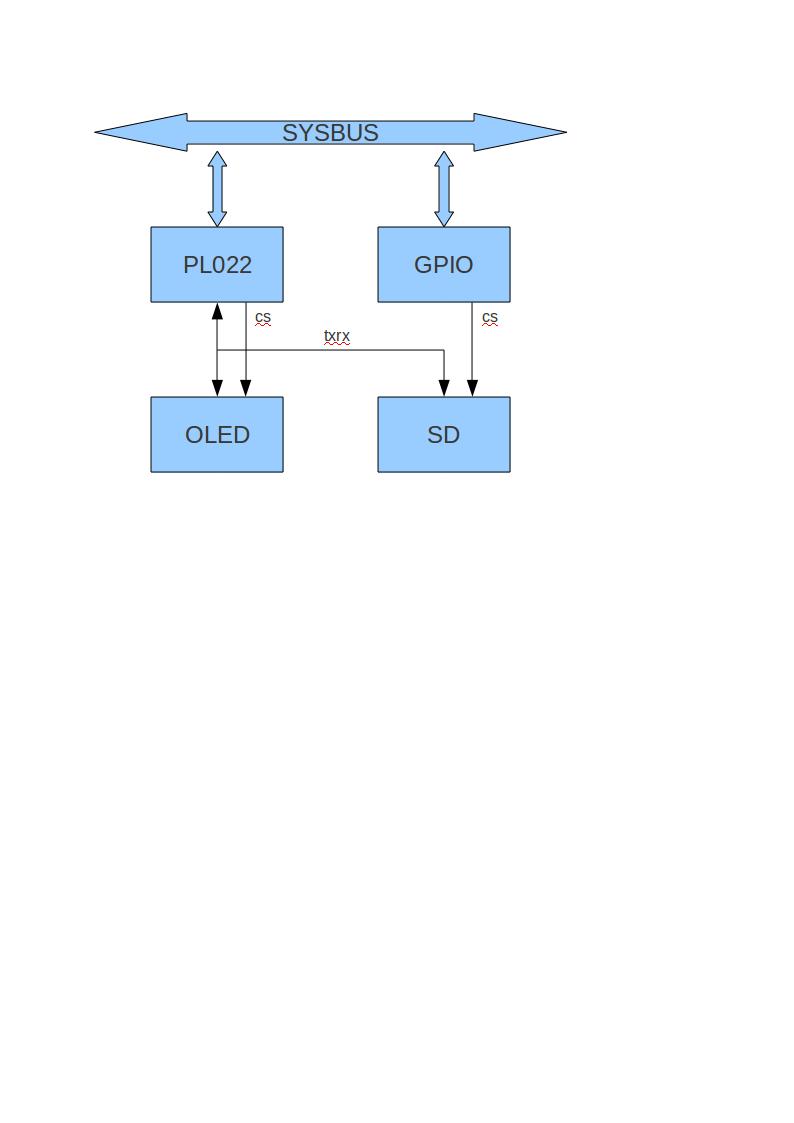
Lets start this again by describing the real hardware. We have two
machines to discuss this time, Stellaris, and Xilinx. I have attached
an image that sums up the Stellaris architecture
(stellaris_real_hw.jpg), Paul correct me if this is inaccurate. For
those who like words instead, it can be summed up as:
- Two SSI devices (OLED + SD) attached to single controller, PL022
- Tx and Rx lines shared between both devices
- One chip select (CS) line (for OLED) comes from the PL022
- The other CS (for SD) comes from a GPIO
Problem is, no SSI device in QEMU emulates CS behaviour, so there is
this virtual mux device in the stellaris machine model that emulates
the CS behaviour of each device (stellaris_emulated.jpg). I have
attached an image that sums it up. For those who prefer code (from
hw/stellaris.c):
typedef struct {
SSISlave ssidev;
qemu_irq irq;
int current_dev;
SSIBus *bus[2];
} stellaris_ssi_bus_state;
static void stellaris_ssi_bus_select(void *opaque, int irq, int level)
{
stellaris_ssi_bus_state *s = (stellaris_ssi_bus_state *)opaque;
s->current_dev = level;
}
static uint32_t stellaris_ssi_bus_transfer(SSISlave *dev, uint32_t val)
{
stellaris_ssi_bus_state *s = FROM_SSI_SLAVE(stellaris_ssi_bus_state, dev);
return ssi_transfer(s->bus[s->current_dev], val);
}
static const VMStateDescription vmstate_stellaris_ssi_bus = {
.name = "stellaris_ssi_bus",
.version_id = 1,
...
};
The thing is, there is no actual hardware for this mux. its just three
copper traces on a board.
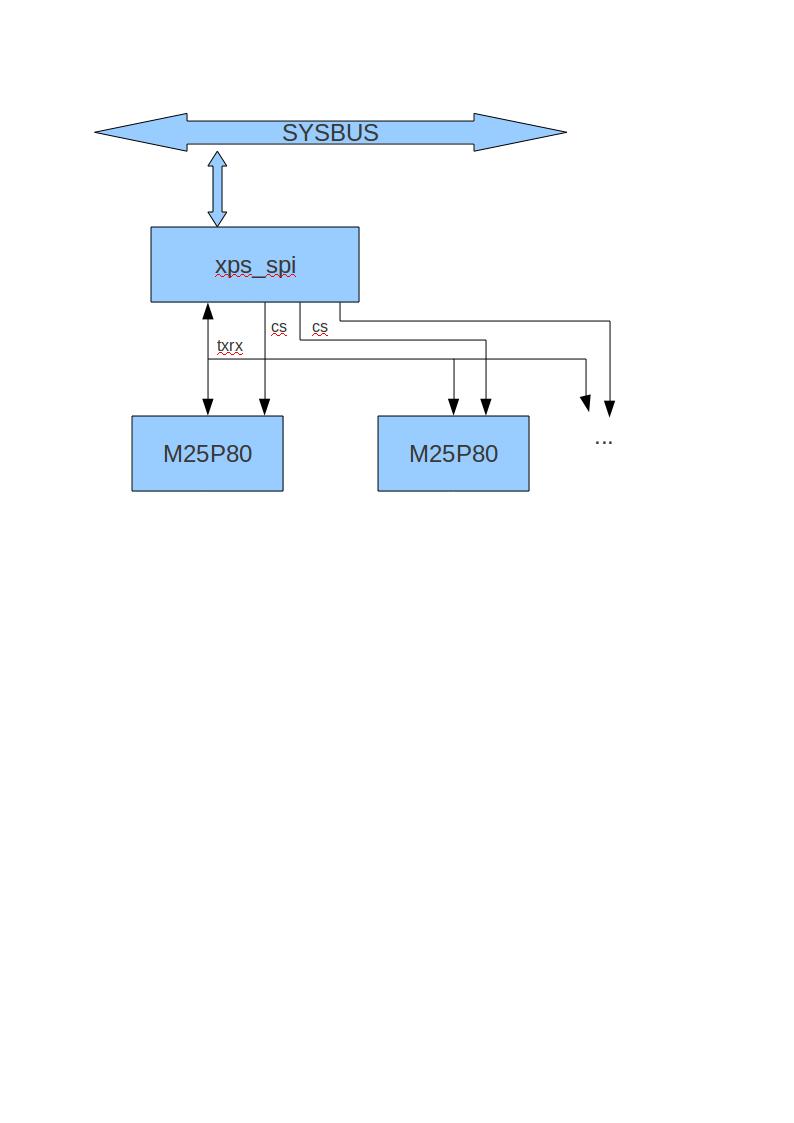
Moving onto Xilinx, the real hardware is summed up in the attached
image (xilinx_real_hw.jpg). For those that prefer words:
- N SSI devices attached to a single controller, xps_spi
- Tx and Rx lines shared between all devices
- N chip selects come from the xps_spi controller for the N devices
So, here are the issues:
A: We need to emulate CS behavior (without machine models having to
create these strange glue devices).
B: We need to emulate multiple devices attached to one SPI controller
(again without glue devices).
Heres the proposal:
-SSI bus is changed to multiple device. You can attach as many devices
as you want to a single SSI bus. When the master initiates a transfer,
all devices have their transfer() function called. The results are
logically or'ed together from each device (youll see how this works
out if you keep reading). There is no CS behaviour emulated in the bus
itself (which is contrary to my patch - its my new proposal).
-SSI_Slave becomes an abstract device. which defines an abstract
function do_transfer(). The SSI Slave devices we have today inherirt
from this and the existing transfer() function for each SPI device
becomes this do_transfer function. The abstract class (SSISlave)
defines a single GPIO input for the CS line. The transfer() function
(which is called by the bus or controller) is implemented on the
SSISlave abstract layer, and will call and return do_transfer() if the
CS GPIO is set, otherwise is returns 0. The big advantage is there is
no or only trivial changes to the existing SSI devices. This all
happens at the abstract layer and a little bit of machine model
improvement - i.e. this means steallaris' virtual Mux will go away
completly (as the CS GPIOs are attached directly to the SSISlave
device).
My Xilinx spi controller will have N GPIO outs that just connect to
the N SPI devices on the machine model layer.
So here are the nitty-gritty details around the pending QOM stuff:
Anthony is currently overhauling QBus, and im guessing the SSI bus is
part of that? qom-next stable enough in this area to look at or not?
Also Anthony mentioned recently some GPIO refactoring stuff - Are
GPIOs on multiple levels of abstraction supported yet? IE if I have a
SPI GPIO device, I need a GPIO on the SSISlave layer but also GPIOs on
my (concrete) device layer. I know this currently doesnt work cos of
qdev but thats going away right?
Regards,
Peter
![]() stellaris_real_hw.jpg
stellaris_real_hw.jpg
Description: JPEG image
![]() stellaris_emulated.jpg
stellaris_emulated.jpg
Description: JPEG image
![]() xilinx_real_hw.jpg
xilinx_real_hw.jpg
Description: JPEG image
| [Prev in Thread] | Current Thread | [Next in Thread] |
{kind=link}
{kind=link}