[Top][All Lists]
[Date Prev][Date Next][Thread Prev][Thread Next][Date Index][Thread Index]
Re: [Slipstream-devel] Rider upper body roll and translation
|
From: |
Dimitris Papavasiliou |
|
Subject: |
Re: [Slipstream-devel] Rider upper body roll and translation |
|
Date: |
Thu, 22 Dec 2011 02:20:08 +0200 |
With the new rider parameters(*) the motorcycle seems more unstable
and harder to ride. I nevertheless think that it is rightly so. The
bike rides pretty well except in three cases:
a) When landing from a wheelie,
b) When shifting during a turn,
c) When trying to stand the bike up from a turn and lean it into an
opposite one under full throttle
These all have the same underlying cause: when the bike is
accelerating the front wheel is unloaded. It is then able to develop
large sideslip angles without significantly affecting the chassis.
You can feel it when riding in the real world in that the steering
becomes lighter when under full throttle but also less capable to
actually steer the bike. In case a) of course the front is completely
unloaded while in b) you're typically at full throttle when upshifting
so the front is at least partially unloaded. The problem starts when
the front is again loaded for cases a) and b). This happens as power
is lost during a shift or simply because the front touches down again
when lading from a wheelie. The large sideslip angle then affects the
bike dramatically leading to a tank-slapper. This is typically how a
tank-slapper arises in the real world too although the cause might be
a pothole sending the front airborne and jerking the rider into making
unintentional steering inputs. For c) the problem arises due to the
development of an exceptionally large sideslip angle which upsets the
bike and initiates a wobble.
In the real world this is usually easily compensated for by the rider
making sure that the steering head points more or less where it's
supposed to be pointing when landing from a wheelie or by stopping to
apply torque on it if it fees light and doesn't seem to response. In
the simulation this is harder to do. It can be avoided by not
shifting while in a turn or closing the throttle when standing up from
a lean or leaning the other way. I don't see how it can be avoided
when landing from a wheelie though.
Perhaps some control system would be a good idea. I tried
implementing the following strategies:
a) Gradually reduce the input torque to the steering head to zero as
the front load drops below a certain threshold.
b) Gradually reduce the input torque to the steering head to zero as
the front wheel sideslip rises above a certain threshold.
The first is supposed to help keep the steering head stable as the
front rises into a wheelie so that you won't suffer too big a wobble
when you land. The second is meant to help with case c) above.
Feedback as to the effectiveness and suggested values are welcome.
The systems above seem to be pretty successful with cases a) and c)
but case b) is still a big problem. Actually the explanation above is
more or less wrong. The current transmission model is somewhat of a
cheat. Shifts are performed clutchless much like upshifts are done in
races but while in the real world you have to at least cut the spark
for a fraction of a second to unload the transmission and allow the
current gear to disengage and the next to engage in Slipstream this
isn't necessary. So no power is lost during an upshift although some
slipping takes place naturally to synchronize the primary and
secondary shafts in the gearbox (much like what happens in a
clutchless shift in the real world).
Not only is no power lost, but some of the energy that was stored in
the crankshaft is transferred to the wheel as the crankshaft spins
down during the upshift. This can be seen in the first attached plot
showing the torque transmitted from the engine to the rear wheel
through the clutch. Here the throttle is held constant but at the
fifth second and between seconds 7 and 8 two upshifts take place
resulting in sharp spikes of extra torque to the rear wheel. The
spike after the eighth second corresponds to a downshift at high rpm
which results in a rapid reversal of torque from the rear wheel to
speed up the engine (and possibly an instant rear wheel lock).
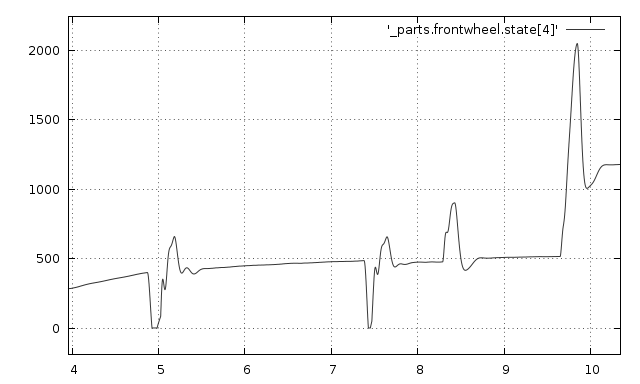
In the second attached plot the front wheel load for the same session
can be seen. Here we can see the front unloading as a result of the
extra torque to the rear wheel which mean more acceleration and hence
more load transfer. The problem is that this begins a small
oscillation which upsets the chassis. When running in a straight line
this is hardly noticeable but in a turn it can easily develop into a
tank-slapper when under full throttle.
So one solution to the problem would be a carefully timed closing of
the throttle when upshifting to reduce the torque spike. This would
probably be tricky to get right even assuming it can eliminate the
problem. Another solution would be a special slipper clutch that
would disengage when the torque transmitted through it changes rapidly
to smoothen out such spikes. This would be a bit of a cheat as I
don't know of the use of such a device in the real world (except for
eliminating back-torque during down-shifts which can be done with a
slipper-clutch). Finally perhaps a simple suspension tuning would fix
the problem. Suggestions are welcome especially experimental
suspension stiffness and damping setups.
D.
(*) Experimenting with rider yaw stiffness is worth it by the way as
it corresponds to how tight a grip the rider has on the steering.
The value 120Nm/rad corresponds to an empirical value of a tight,
stiff grip according to [1] and 60Nm/rad to a relaxed grip. I now use
a value of 70Nm/rad as it seems to work best.
[1] On steering wobble oscillations of motorcycles, R S Sharp and D J N Limebeer
On Fri, Dec 16, 2011 at 1:05 AM, Dimitris Papavasiliou
<address@hidden> wrote:
> The current implementation allows the upper body of the rider to roll
> or lean and also to move laterally. This simulates the actual
> behavior of the rider which is important in terms of vehicle stability
> as the rider not only dampens the oscillation of the vehicle frame but
> also feeds some of them back through her hands to the steering stem.
> This latter part has an interesting side-effect.
>
> This is because I though it wise to actually force the rider to lean
> and move the upper body laterally into the turn as the motorcycle
> itself leans into the turn to mimic this typical behavior of real-life
> riders but this seems to have the side-effect of applying steering
> torque too. In fact when setting "roll and lateral translation gain
> with respect to motorcycle roll" to 0 the motorcycle seems to be much
> more stable at large lean angles (reaching as much as 59-60 degrees of
> lean which is a bit of an embarrassment really) and it also needs more
> steering torque to do so. The later is presumably because before some
> steering torque was provided by the motion of the upper body.
>
> Another interesting result of setting roll and translation gain to 0
> (which means that the rider always tries to stand upright resisting
> the tendency of the bike to throw him around) is that now it seems to
> have become more unstable in terms of wobble during brake. Changing
> the stiffness and damping of the rider body to numbers found in [1]
> seems to remedy that though. The translational stiffness was absurdly
> high before because otherwise the bike would be unstable so it's
> rather reassuring that now sane values actually lead to stability
> (which is what the paper predicts too).
>
> My current rider control values are:
>
> Upper body roll 1760 Nm/rad stiffness and 220 Nms/rad damping.
> Upper body yaw 120 Nm/rad stiffness and 13.5 Nms/rad damping.
> Upper body lateral translation 38862 N/m stiffness and 660 Ns/m.
>
> All gains are zero by default and in fact have been removed altogether
> as a feature because they were unrealistic: the stiffness and damping
> of the rider-motorcycle coupling is not the same when the rider is
> upright as when he is hanging from the bike at full lean. This is
> evident in the current setup as the rider's butt serves as a perfectly
> good stand when the bike is dropped.
>
> These settings will probably be made default on the next commit so any
> feedback on whether my observations are correct or not is welcome.
>
> Dimitris
>
> [1] The Significance of Frame Compliance and Rider Mobility on the
> Motorcycle Stability, Roberto Lot, Vittore Cossalter, Matteo Massaro
 torque.png
torque.png
Description: PNG image
load.png
Description: PNG image
{kind=link}
{kind=link}